소개
기술개요
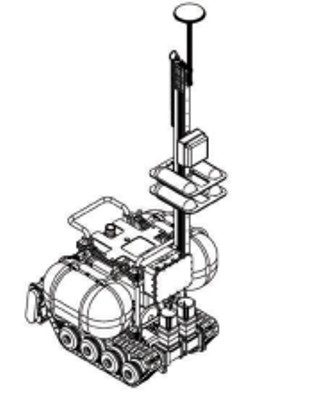
● 수중 청소 로봇
- 해양, 저수조 등 수심이 깊거나 유독한 물질이 포함된 수중 환경에서 이동하면서 이물질을 흡입하는 청소하는 로봇
● 수중 매니플레이터 제어시스템
- 스테레오로 배치된 카메라에서 영상을 기반으로 수중물체의 위치정보를 수집하여 매니뮬레이터의 움직임을 제어
기존기술의 문제점
● 원격무인잠수정
- 높은 전력의 전원시스템 필요
- 플랫폼 몸체가 비대
● 자율무인잠수정
- 수중에서 고도유지 불가
- 측면에서 발생하는 강조류에 취약
● 위치정보만 추정 가능하고, 회전정보 추정 불가
개발기술의 특징 및 효과
● 안전사고 예방
- 인력대신 로봇을 투입해 작업자가 유독성 침전물에 노출되는 것을 방지하여 안전사고를 방지기능
- 저수조의 배수 및 급수에 소비되는 시간 단축
- 청소과정에서 처리된 오염수를 정화하여 수자원 절감
● 성능향상
- 기존 제품 대비 저전력 작동 및 본체 크기 감소
- 강조류 상황에서 고도유지 및 이동이 가능한 수중 이동장치 제공
기술개발 내용
● 수중 매니플레이터 제어 시스템 기술 구현
- 매니플레이터 : 수중에서 작업을 하기 위한 로봇 아암
- 카메라 : 스테레오로 배치되어 물체의 위치정보를 수집
- 터치스크린 : 카메라의 촬영 영상표시 및 로봇 팔의 컨트롤 입력장치
- 컨트롤러
- 모션 계획부
- 엑기구부
추가기술정보
● 적용분야
- 정화조, 저수조 등 수처리 시스템
- 선박청소
- 수중건설로봇
- 수중탐사 로봇
● 시장전망
- 해외 전문서비스 로봇시장 규모
- 국내 전문서비스 로봇시장 규모
(BIM, OSC, 건설자동화, 스마트안전) 이동형 수중 청소 로봇
| 기술명 |
이동형 수중 청소 로봇 |
| 적용 분야 |
사회안전 및 극한작업용 로봇 |
| 기술 완성도 |
TRL 6 |
| 기업명 |
좋은회사 |
| 대표자 |
나대표 |
| 문의처 |
02-1234-5678 |
기술개요
● 수중 청소 로봇
- 해양, 저수조 등 수심이 깊거나 유독한 물질이 포함된 수중 환경에서 이동하면서 이물질을 흡입하는 청소하는 로봇
● 수중 매니플레이터 제어시스템
- 스테레오로 배치된 카메라에서 영상을 기반으로 수중물체의 위치정보를 수집하여 매니뮬레이터의 움직임을 제어
기존기술의 문제점
● 원격무인잠수정
- 높은 전력의 전원시스템 필요
- 플랫폼 몸체가 비대
● 자율무인잠수정
- 수중에서 고도유지 불가
- 측면에서 발생하는 강조류에 취약
● 위치정보만 추정 가능하고, 회전정보 추정 불가
개발기술의 특징 및 효과
● 안전사고 예방
- 인력대신 로봇을 투입해 작업자가 유독성 침전물에 노출되는 것을 방지하여 안전사고를 방지기능
- 저수조의 배수 및 급수에 소비되는 시간 단축
- 청소과정에서 처리된 오염수를 정화하여 수자원 절감
● 성능향상
- 기존 제품 대비 저전력 작동 및 본체 크기 감소
- 강조류 상황에서 고도유지 및 이동이 가능한 수중 이동장치 제공
기술개발 내용
● 수중 매니플레이터 제어 시스템 기술 구현
- 매니플레이터 : 수중에서 작업을 하기 위한 로봇 아암
- 카메라 : 스테레오로 배치되어 물체의 위치정보를 수집
- 터치스크린 : 카메라의 촬영 영상표시 및 로봇 팔의 컨트롤 입력장치
- 컨트롤러
- 모션 계획부
- 엑기구부
추가기술정보
● 적용분야
- 정화조, 저수조 등 수처리 시스템
- 선박청소
- 수중건설로봇
- 수중탐사 로봇
● 시장전망
- 해외 전문서비스 로봇시장 규모
- 국내 전문서비스 로봇시장 규모